20:51 Schneider Electric Altivar 71 (ATV71) PROFIBUS DP коммуникация PZD, PKW в ПО Step7 v5.5 | |||||||||
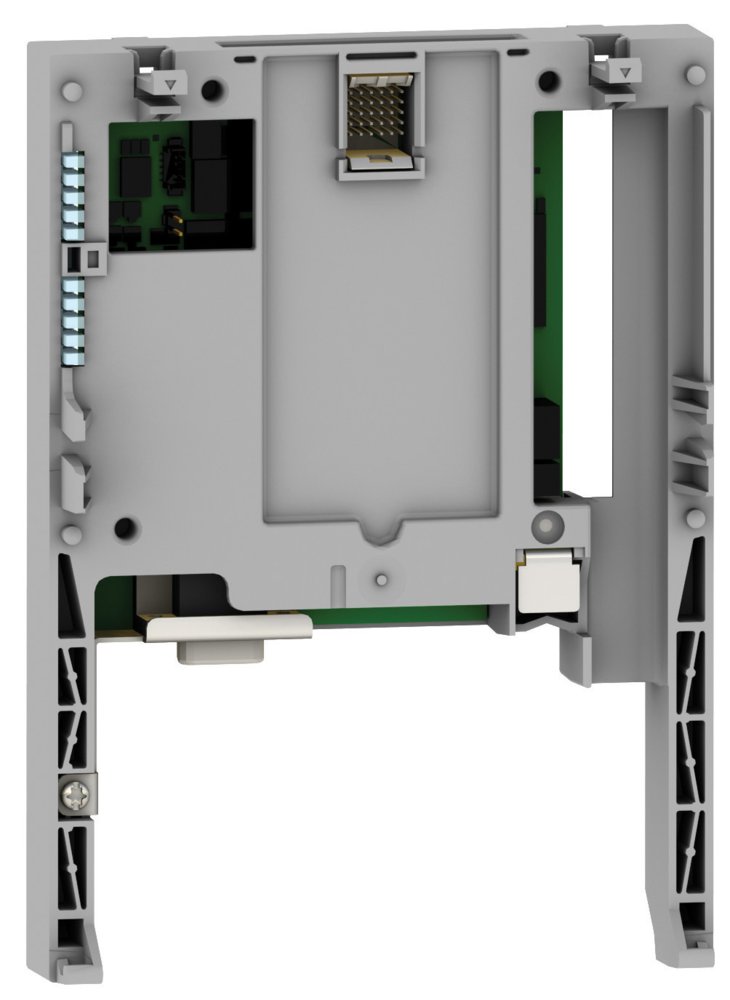
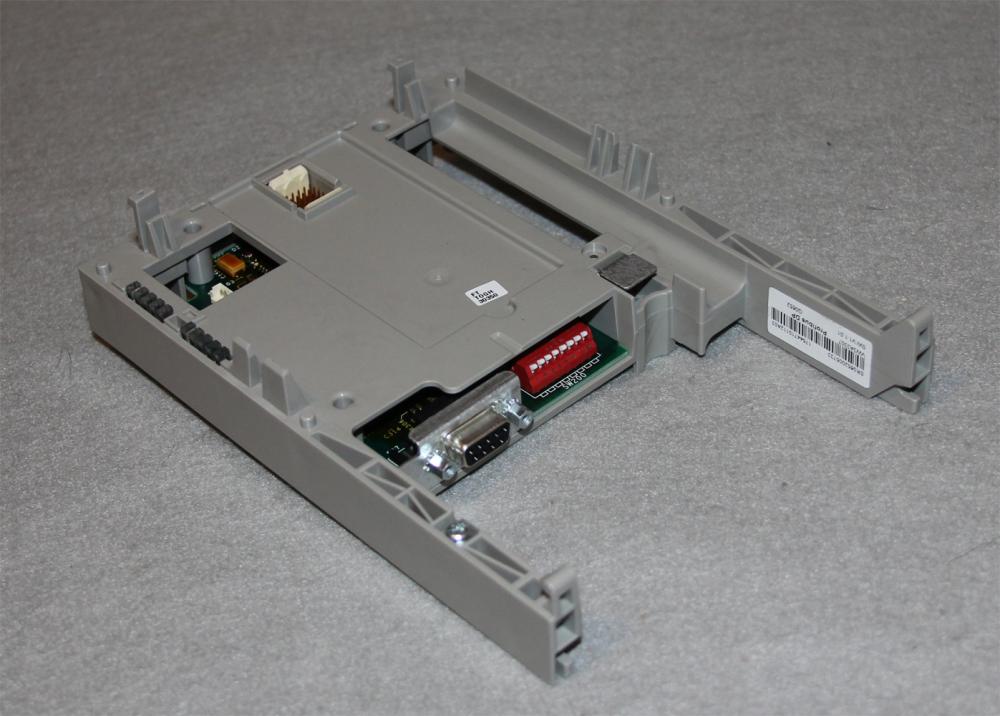
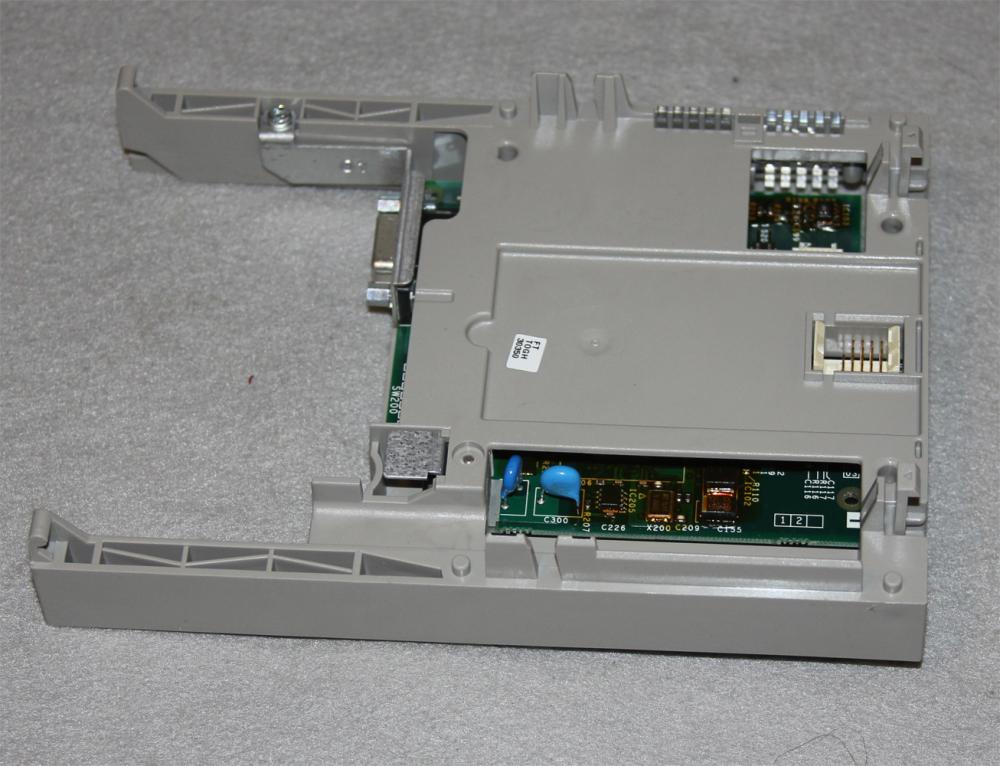
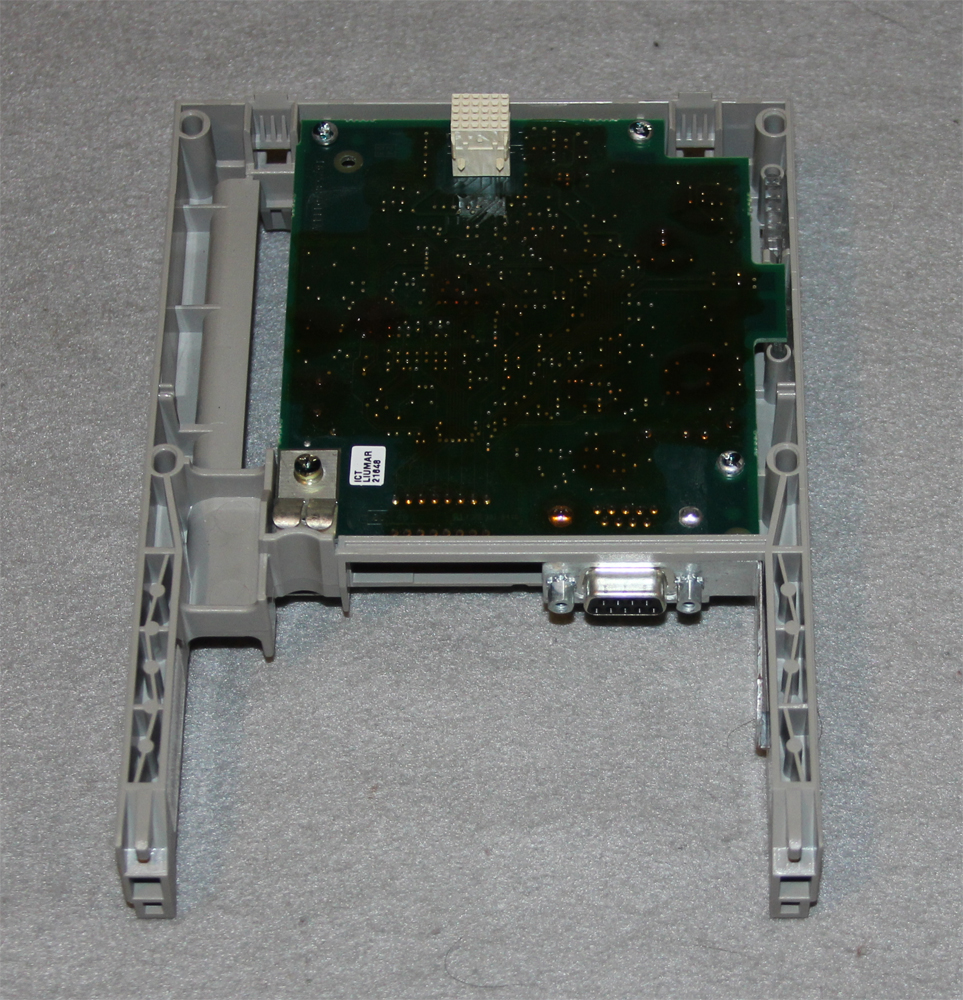
В данной статье рассматривается коммуникация частотного привода Schneider Electric Altivar 71 (ATV71) с контроллерами фирмы SIEMENS через интерфейс PROFIBUS. Данная коммуникация будет осуществляться через 2 области - PZD (Область данных процесса, т.е. слова управления, задания частоты, информация о состоянии привода) и PKW (Область параметров для чтения/записи значений параметров). Для осуществления коммуникации необходима плата PROFIBUS DP VW3 A3 307. Ниже представлены фото коммуникационной платы PROFIBUS DP VW3 A3 307.
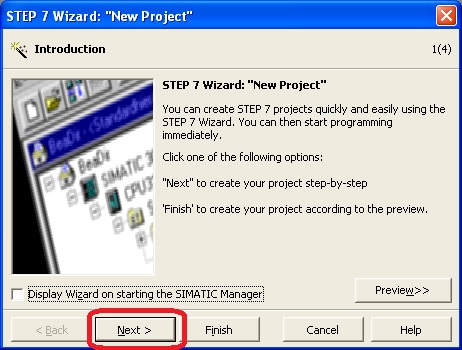
Далее перейдем к конфигурации привода в среде STEP7 v5.5. Создадим новый проект. Меню "File --> 'New Project' Wizard...".
Следующим шагом появится окно менеджера новых проектов, кликаем кнопку "Next".
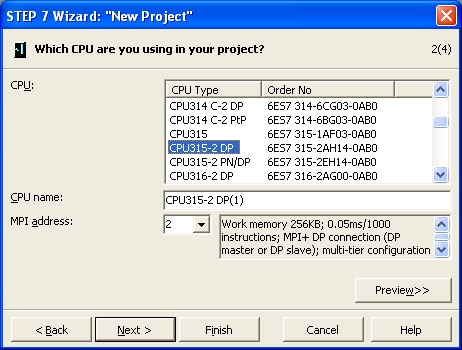
На следующем экране менеджер предложит выбрать тип CPU для проекта. Если у вас есть реальный ПЛК, то укажите его, в случае тестирования на симуляторе - выберите, к примеру, CPU315-2 DP.
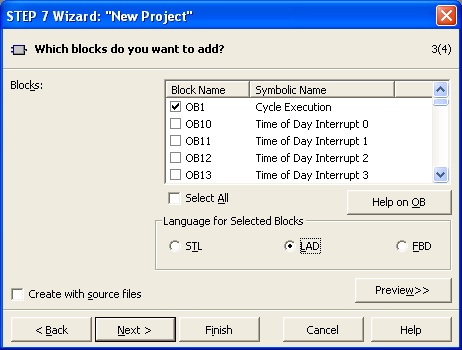
На третьем экране укажем базовый организационный блок OB1, а также указав язык программирования LAD (В дальнейшем все вновь создаваемые функции, организационные блоки и т.п будут создаваться по умолчанию в языке программирования релейных схем.) Но при создании нового блока все равно будет разрешен выбора языка программирования LAD/FBD/STL.
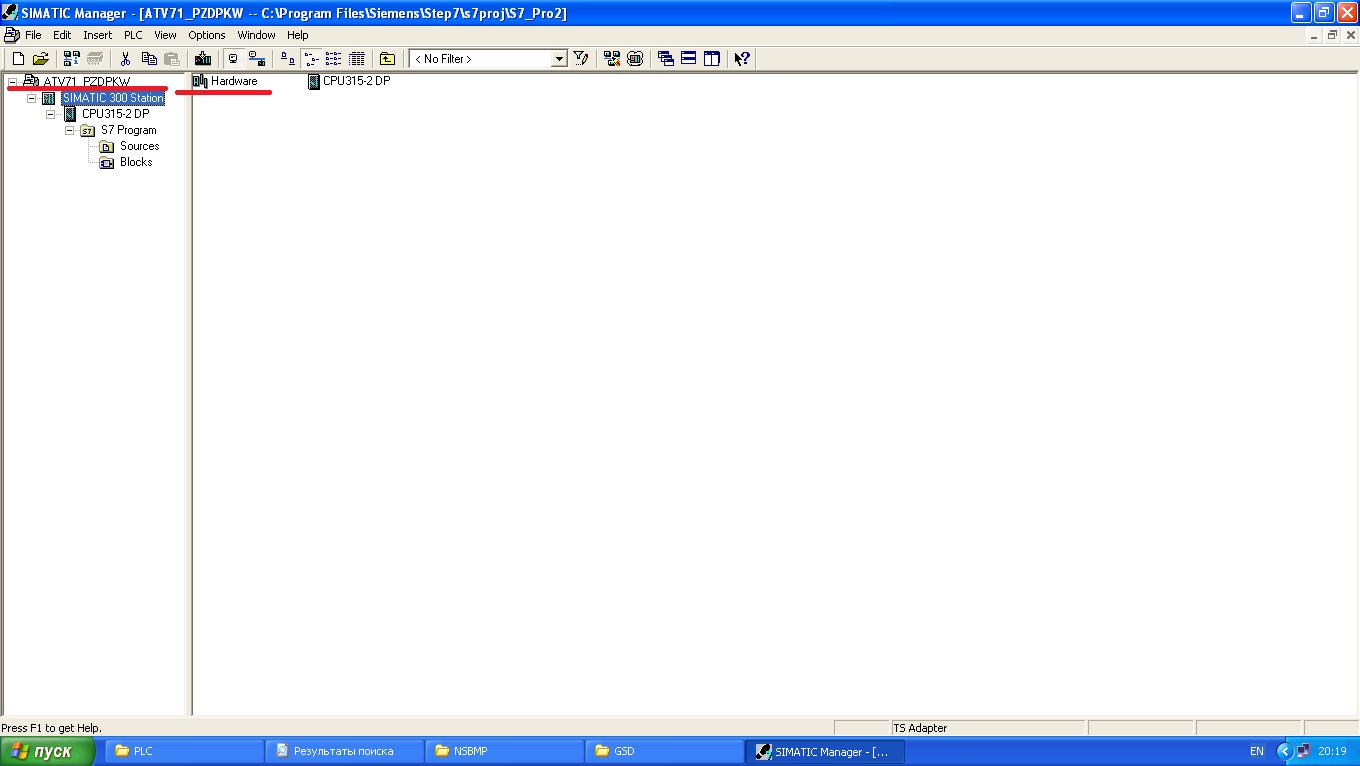
Далее кликаем кнопку "Finish". Создается проект, переименовываем его для того, чтобы наделить его смысловой нагрузкой. Определим имя как "ATV71_PZDPKW".
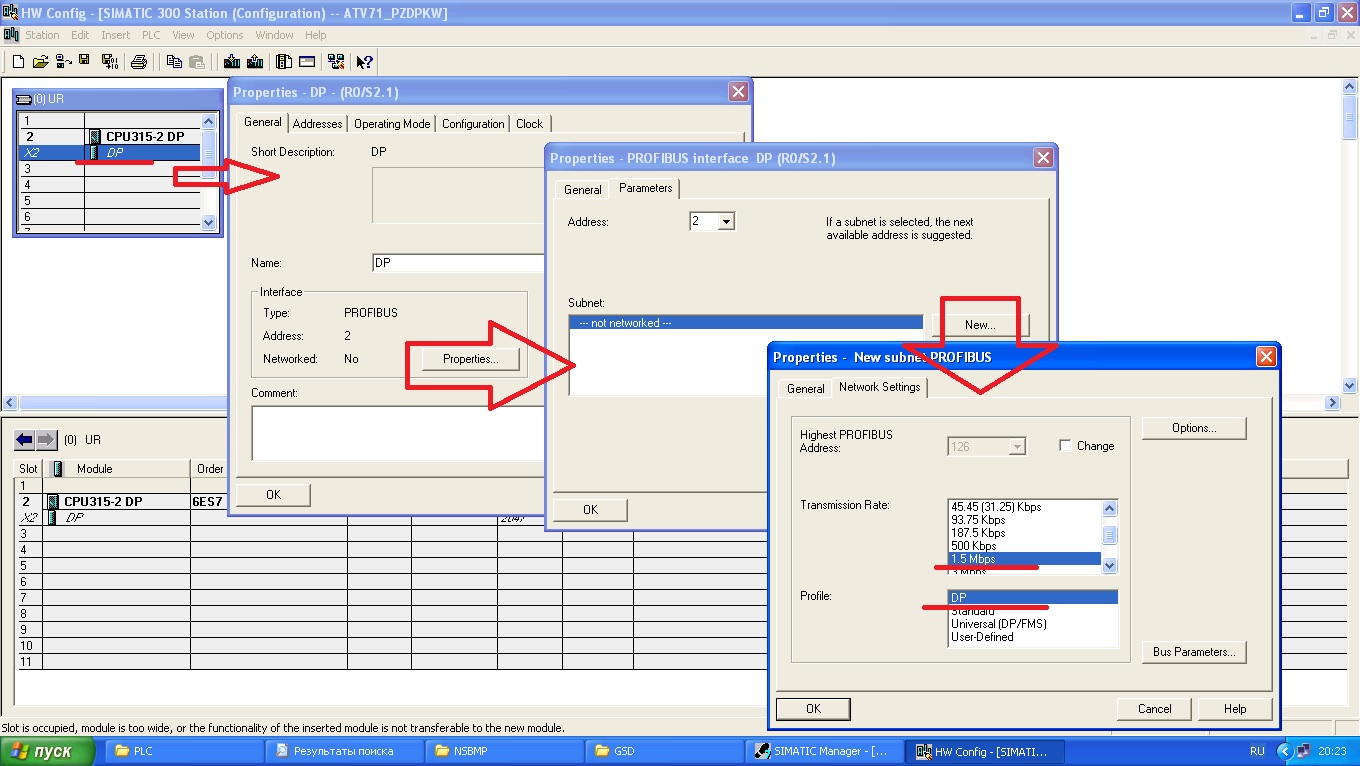
Следующим этапом сконфигурируем привод в железе контроллера - раздел "Hardware". Для этого активируем в настройках контроллера сеть PFOFIBUS со стандартными настройками.
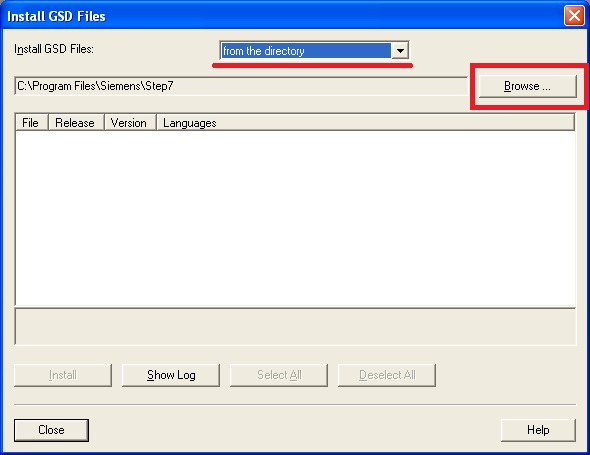
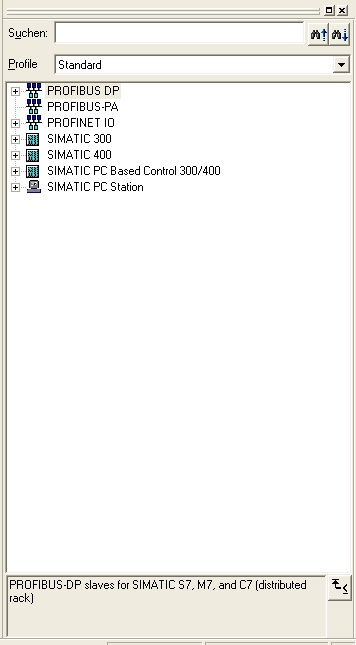
Далее необходимо установить в пакет STEP7 GSD файл привода Altivar 71 (Ссылку на скачивание файла GSD вы сможете найти в конце статьи). Для данной операции необходимо закрыть основное окно "Simatic Manager". Далее в окне "HW Config" закрыть текущую конфигурацию, оставив тем самым только оболочку "HW Config". Открыть меню "Options --> Install GSD file...".
Далее отобразится окно "Install GSD Files", в котором необходимо указать путь, где хранится файл.
После открытия файла, его имя отобразится в середине окна, а его описание появится в строке статуса. Одинарным кликом левой кнопки мыши выделяется файл, затем кликнуть на кнопку "Install". При запросе подтверждения установки ответить "Yes". После появится окно, сигнализирующее об успешном окончании операции.
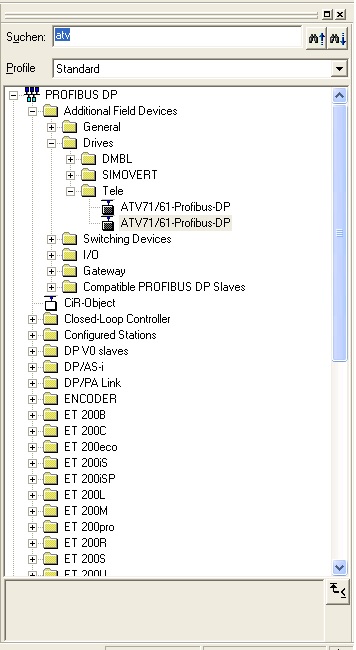
Далее для завершения процесса установки нового файла нажать кнопку "Close". Закрыть окно "HW Config", затем заново запустить "Simatic Manager" и открыть наш проект "ATV71_PZDPKW". Открыть железо и наконец-то добавить привод в сетевую конфигурацию. Для этого необходимо отобразить каталог командой "View --> Catalog". Для поиска нужного нам файла введем в строку поиска надпись вида "atv", подтвердив поиск клавишей "ENTER".
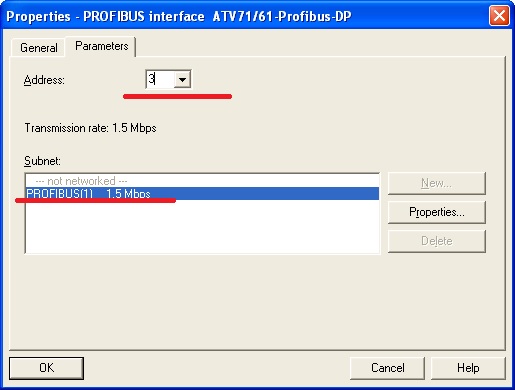
Следующим шагом методом "drag-and-drop", иначе перетаскивание с удержанием левой кнопки мыши, перенесем указанный GSD-файл на сеть "DP master system". Откроется окно свойств, в котором необходимо указать адрес преобразователя в сети PROFIBUS, в нашем случае адрес 3.
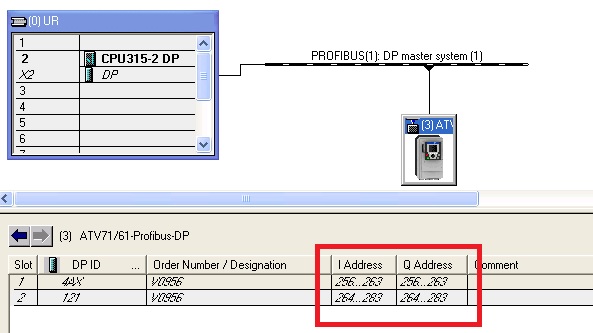
После добавления привода в конфигурацию система автоматически распределяет адреса для областей PZD и PKW. В 1-м слоте с ID = 4AX выделено 8 байт (4 слова) для области PKW с 256 байта по 263 байт. Во 2-м слоте с ID = 121 выделено 20 байт (10 слов) для области PZD с 264 байта по 283 байт. При необходимости данную адресацию возможно изменить вручную.
Итак, перейдем к самому интересному этапу материала. Поставленная задача будет решаться через область PKW - необходимо изменять в приводе 2 параметра (номинальный ток двигателя и заданную мощность) согласно установке двух типов двигателя:
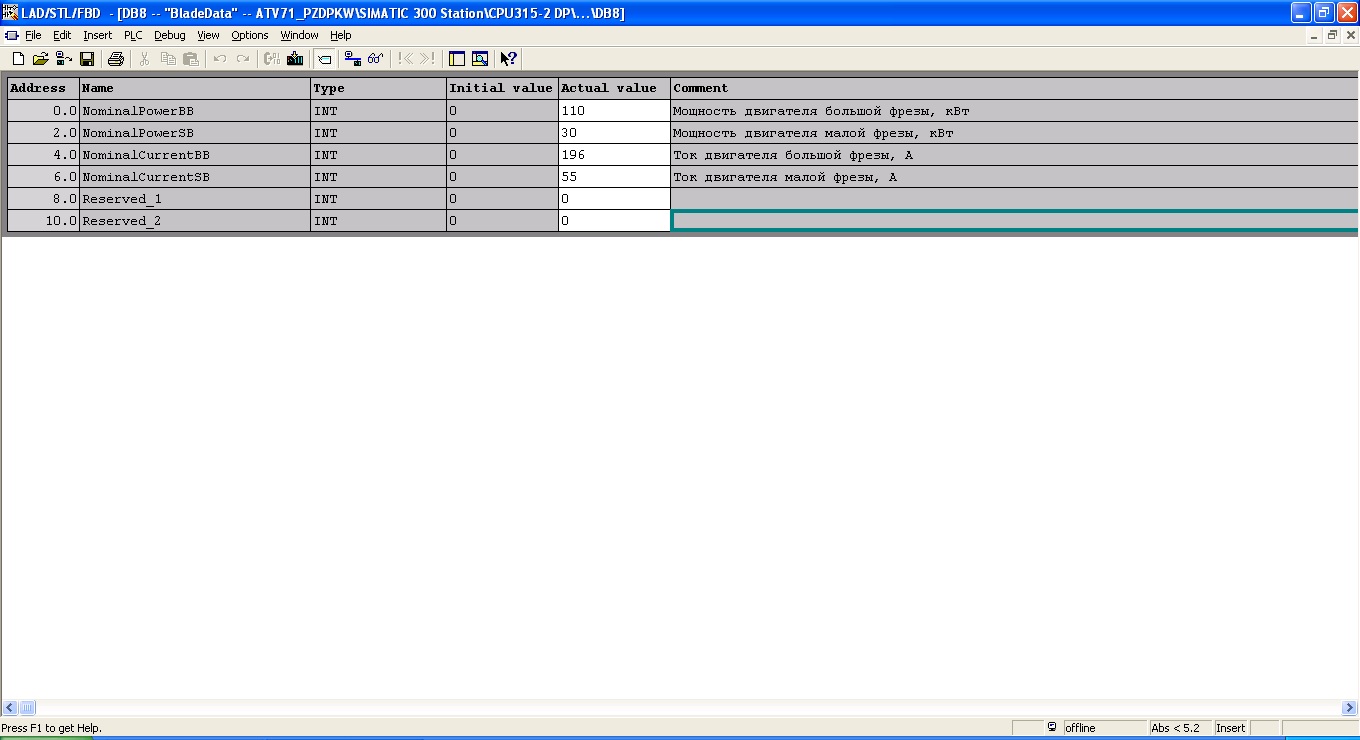
В качестве органа управления, выбирающего тип установленного двигателя, выступает переключатель, установленный на пульте управления. Данные о параметрах двигателей будут храниться в блоке данных DB8 BladeData.
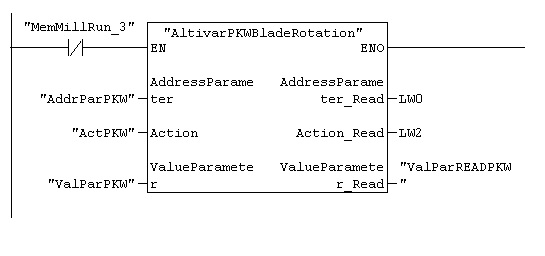
Для записи и чтения параметров привода создается функция FC10 - AltivarPKWBladeRotation. В ней используются адреса PKW из HWConfig. Реализация на языке STL, код представлен ниже. ============================================================================== // Адрес параметра // Запрос действия // Значение записываемого параметра // Чтение параметров области PKW L PIW 258 // 2-ое слово области OUT PKW L PIW 262 // 4-ое слово области OUT PKW ============================================================================== В данной функции нет никакой математики - простая логическая пересылка данных в область выходов, а затем считывание данных из области входов. Далее эта функция будет вызываться в основной функции FC7 - BladeRotParametrization. Так как для реализации временного периода нужен шаг времени, поэтому применяется в качестве дискреты время предыдущего скана программы, измеряемое в миллисекундах. Для этого создадим переменную "PLCPrevScanCycle" (mw112). А в блоке OB1 в 1-м нетворке пропишем следующие инструкции: ============================================================================== L #OB1_PREV_CYCLE ============================================================================== Далее перейдем к функции FC7 - BladeRotParametrization. Механизм PKW NW1: Условный цикл на 1500 мс, переменная "MemMillRun_3" (m1009.5) - сигнал о том, что оборудование запущено в автоматическом режиме.
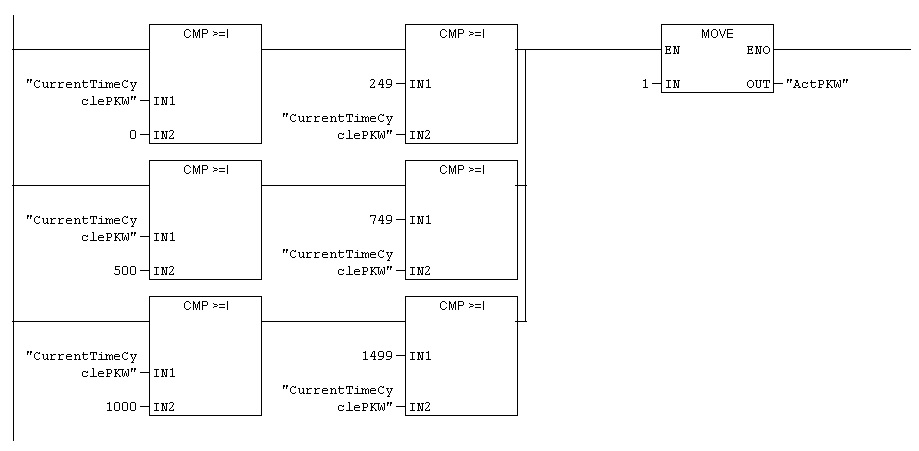
NW2: Чтение параметра мощности и тока из привода, ВРЕМЯ 0-249 мс
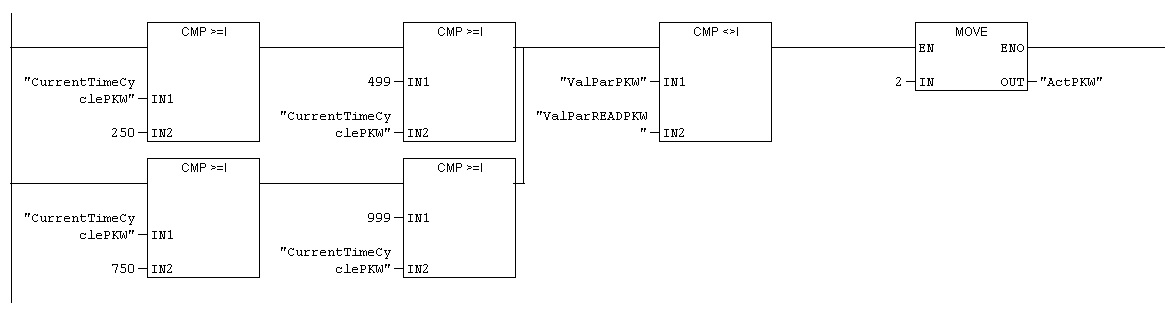
NW3: Запись заранее выбранного значения мощности и тока ВРЕМЯ 250-499 мс
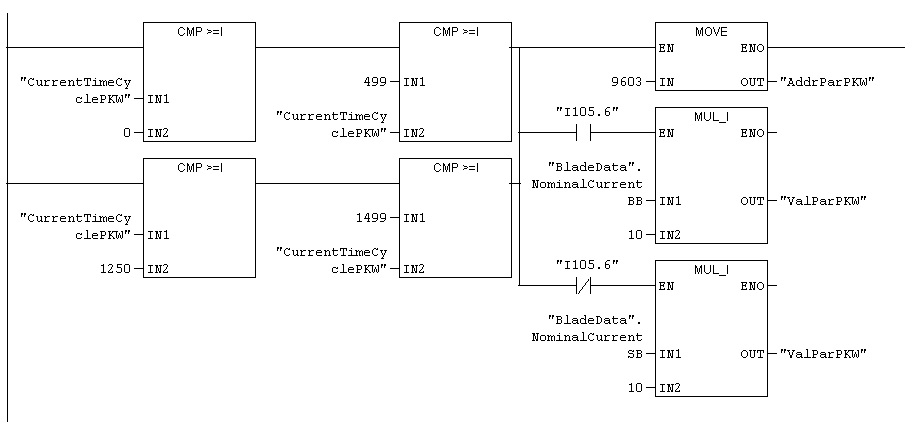
NW4: Выбор адреса и значения тока, ВРЕМЯ 0-499 мс
NW5: Выбор адреса и значения мощности, ВРЕМЯ 0-499 мс
NW6: Обмен словами PKW c приводом Вызывается функция FC10
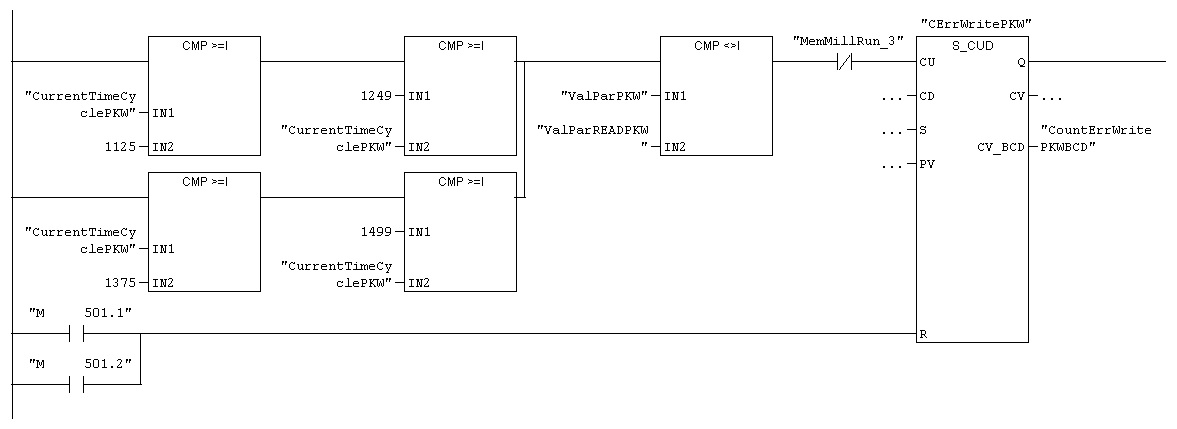
NW7: Счет неудачных попыток записи параметров, "CErrWritePKW" - C10 - счетчик ошибок "M 501.1", "M 501.1" - ф/поз сброса неисправностей
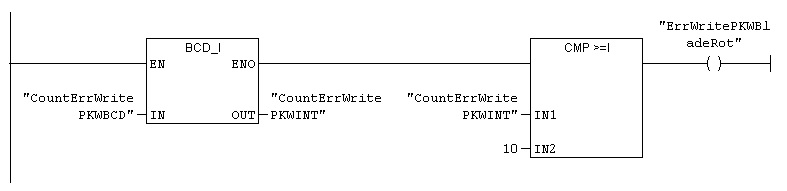
NW8: Установка неготовности привода фрезы после 10 попыток, "ErrWritePKWBladeRot" M5.7 - Ошибка записи параметров области PKW привода вращения фрезы
Осталось вызвать функция в организационном блоке OB1. NW2: CALL "BladeRotParametrization" Ссылки на необходимый материал: Руководство пользователя PROFIBUS DP Altivar 71 ATV71_Programming_manual_v5.7.pdf Список коммуникационных параметров ATV71_S383_communication_parameters_EN_V5.9 GSD файлы ATV61_71_Profibus_DPv0_DPv1 Проект STEP7 v5.5 ATV71_PZDPKW
| |||||||||
|
| |||||||||







| Всего комментариев: 0 | |